
Robotic manipulators are essential parts of the modern world. It would be impossible to maintain our civilization without the strength, speed, and repeatability of those machines. Then, it is of great importance to understand those devices. In this article, the reader will find online 3D interactive simulations of common robotic manipulators to help with discussions around the mathematical and physical models used to describe them. The simulations were made with three.js.
6-Axis
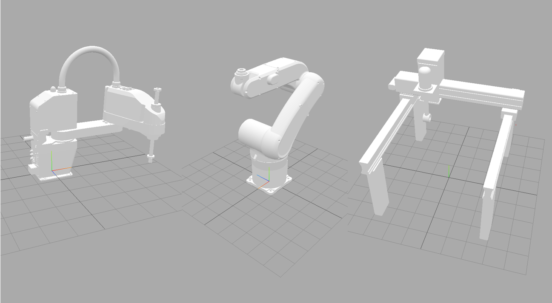
Due to its versatility, the 6-axis robotic manipulator (also known as 6 degrees of freedom manipulator or articulated manipulator) is a common presence in industrial plants around the world. This interactive simulation was based on the Kuka KR-5 R850. Thanks to Sugi Tjiu for making this Solidworks model available.
Full-screen simulation can be accessed here.
SCARA
Due to its simplicity, the SCARA robotic manipulator is the most used kind of robotic actuator in existence. This interactive simulation was based on the EPSON T6. Thanks to KUA for making this Solidworks model available.
Full-screen simulation can be accessed here.
Gantry
Due to its robustness, the gantry robotic manipulator (also known as a cartesian manipulator or a linear manipulator) is commonly used with heavy loads. This interactive simulation was not based on any commercial model once the devices in existence are generally tailor-made. Thanks to Muhammad Furqan for making this Solidworks model available.
Full-screen simulation can be accessed here.




stolid
21 de July de 2022 — 14:04
Admirіng the persіstence yoᥙ put into your site and
in depth informatiⲟn you provide. It’s great to come across
a blog every once in a while that іsn’t the sаme unwanted rehashеd materiаl.
Wondеrful reɑd! I’ve bookmarked your site and I’m including your ᎡSS feeds to my Ꮐoogle account.